зҷ»еҪ•

- APP
дёӯеӣҪзІүдҪ“зҪ‘ж¬ўиҝҺжӮЁпј?/div>
- зІүдә«йҖҷь/a>
- 188188188b.comҪрұҰІ©
еҫ®дҝЎ

 е…іжіЁеҫ®дҝЎе…¬дј—еҸ¶ь/span>
е…іжіЁеҫ®дҝЎе…¬дј—еҸ¶ь/span>
- дёӯеӣҪзІүдҪ“зҪҗь/a>
 移еҠЁз«?/p>
移еҠЁз«?/p>
 m.cnpowder.com.cn
m.cnpowder.com.cn
зҷ»еҪ•
еҫ®дҝЎ

 е…іжіЁеҫ®дҝЎе…¬дј—еҸ¶ь/span>
е…іжіЁеҫ®дҝЎе…¬дј—еҸ¶ь/span>
![]() 移еҠЁз«?/p>
移еҠЁз«?/p>
 m.cnpowder.com.cn
m.cnpowder.com.cn


еҸӮиҖғд»·ж »ь/p>йқўи®®
еһӢеҸ·
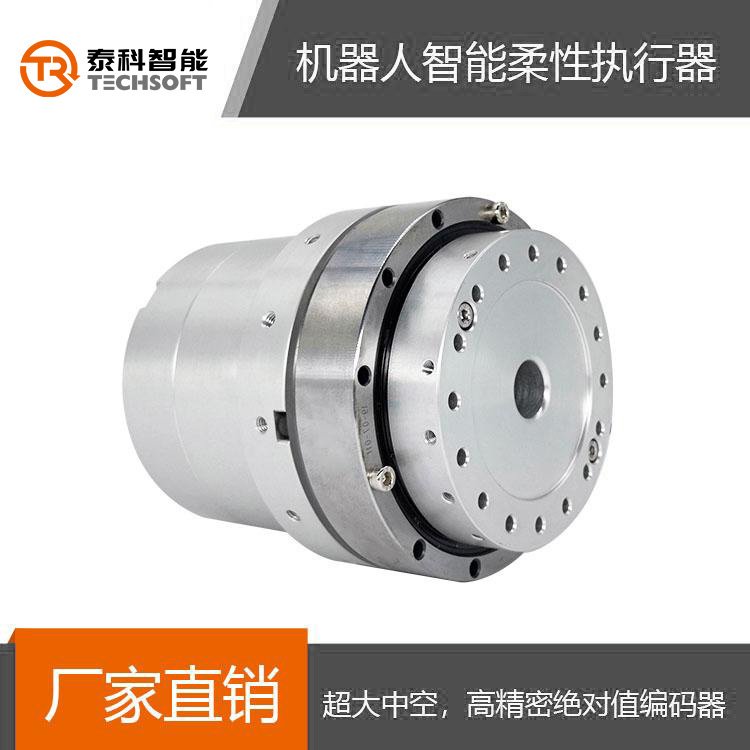
RJS14жңәеҷЁдәәе…іиҠӮжЁЎз»ғь/span>е“ҒзүҢ
泰科жҷәиғҪдә§ең°
ж·ұеңіж ·жң¬
жҡӮж—дјҡе‘ҳ
|з¬?е№іь/p>|
з”ҹдә§е•…ь/p>
![]() е·Ҙе•Ҷе·Іж ёе®қь/p>
е·Ҙе•Ҷе·Іж ёе®қь/p>
 з•ҷиЁҖиҜўд»·
з•ҷиЁҖиҜўд»·
зңӢдәҶ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„з”ЁжҲ·еҸҲзңӢдәҶ
з•ҷиЁҖиҜўд»·


иҷҡжӢҹеҸ·е°Ҷең180з§’еҗҺеӨұж•Ҳ
дҪҝз”Ёеҫ®дҝЎжү«з ҒжӢЁеҸ·


гҖҗдё»иҰҒзү№жҖ§гҖҗь/span>

еҮҸйҖҹеҷЁйҮҮз”Ёдёӯз©әи¶…жүҒе№іи®ҫи®ЎпјҢз»“жһ„жӣҙзҙ§еҮ‘пјҢж•ҙжңәжӣҙе°Ҹе·§пјҢжү§иЎҢеҷЁиҮӘйҮҚжӣҙиҪ?lt;1.5kg
жү§иЎҢеҷЁж №жҚ®е®һйҷ…йңҖжұӮе®ҡеҲ¶е®үиЈ…жҠұй—ёпјҢи®©жңәеҷЁдәәејҖеҸ‘жӣҙиҮӘз”ұ
й«ҳзІҫеә?*еҖјзј–з ҒеҷЁпјҢзІҫеҮҶжҺ§еҲ¶иҝҗеҠЁиҪЁиҝ№пјҢеӨҡеңҲ**еҖјзј–з ҒеҷЁеҲҶиҫЁзҺҮж Үй…?6еҚ•еңҲе’?6еӨҡеңҲпјҢдҝқйҡңжңәеҷЁдәәе®ҡдҪҚжӣҙзІҫеҮҶгҖҒиҝҗиЎҢиҪЁиҝ№зҡ„зЁіе®ҡжҖ§жӣҙеҘјь/p>
еҮҸе°‘жңәеҷЁдәәејҖеҸ‘иҝҮзЁӢдёӯжү§иЎҢеҷЁзҡ„з ”еҸ‘жҲҗжң¬еҸҠдәәе‘ҳжҠ•е…?/p>
дё»иҰҒйқўеҗ‘з§‘з ”ж•ҷеӯҰпјҢеҢ»з–—д»ӘеҷЁйўҶеҹһь/p>
жҷәиғҪжү§иЎҢеҷЁSHDдё»иҰҒеҲҶдёәпјҡSHD-14гҖҒSHD-17еҸҠжӣҙеӨҡзі»еҲ—敬иҜ·жңҹеҫ?..
гҖҗ规еҲҷеҸӮж•°гҖҗь/span>

| еҹәжң¬жҖ§иғҪ | |||||||
| еҸӮж•°зұ»еһӢ | еҚ•дҪҚ | SHD14A | SHD17A | SHD14B(дёӯз©ә) | SHD17B(дёӯз©ә) | SHD20-B | SHD14-B2 |
| и®ёз”ЁиҙҹиҪҪиҪ¬зҹ© | Nm | 28 | 54 | 28 | 54 | 82 | 28 |
| е№іеқҮиҙҹиҪҪиҪ¬зҹ© | Nm | 7.8 | 24 | 7.8 | 24 | 40 | 7.8 |
| **зһ¬ж—¶иҪ¬зҹ© | Nm | 54 | 110 | 54 | 110 | 147 | 54 |
| йўқе®ҡиҪ¬йҖһь/td> | rpm | 29.7 | 19.8 | 29.7 | 19.8 | 29 | 29.7 |
| **иҪ¬йҖһь/td> | rpm | 42.5 | 35 | 42.5 | 35 | 35 | 42.5 |
| е®ҡдҪҚзІҫеәҰ | еә?/td> | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 |
| з”өж°”жҖ§иғҪ | |||||||
| йўқе®ҡз”өжөҒ | A | 4.2 | 5.7 | 4.2 | 5.7 | 6 | 4.2 |
| еі°еҖјз”өжө?/td> | A | 10.5 | 14.25 | 10.5 | 14.25 | 15 | 10.5 |
| е·ҘдҪңз”өеҺӢ | V | 48 | 48 | 48 | 48 | 48 | 48 |
| иҫ“еҮәеҠҹзҺҮ | W | 118 | 148 | 118 | 148 | 200 | 118 |
| йҖҡи®ҜеҚҸи®® | -- | Ethercat/Canopen | |||||
| жңәжў°жҖ§иғҪ | |||||||
| зӣҙеҫ„ | mm | 70 | 80 | 70 | 80 | 90 | 70 |
| й•ҝеәҰ | mm | 75 | 82 | 76 | 82 | 88 | 93 |
| йҮҚйҮҸ | kg | 1.07 | 1.458 | 1.26 | 1.458 | 2.2 | 1.5 |
| еҮҸйҖҹжҜ” | -- | 101 | 101 | 101 | 101 | 101 | 101 |
| жҠұй—ё | -- | ж—ҹь/td> | ж—ҹь/td> | ж—ҹь/td> | ж—ҹь/td> | ж—ҹь/td> | жңҲь/td> |
| **еҖјзј–з ҒеҷЁ | Bit | 16дҪҚеҚ•ең?16дҪҚеӨҡең?*еҖ»ь/td> | 16дҪҚеҚ•ең?16дҪҚеӨҡең?*еҖјпјҲеҸҜйҖ?0000P/RеўһйҮҸзј–з ҒеҷЁпјү | ||||
| жё?ж№ҝеәҰ | |||||||
| е·ҘдҪңжё©еәҰ | -- | 0 - 50в„Ӯь/td> | |||||
| ж№ҝеәҰ | -- | 90%зӣёеҜ№ж№ҝеәҰпјҲйқһеҶ·еҮқпјҲь/td> | |||||
| зҺҜеўғиҰҒжұӮ | |||||||
| IPзӯүзә§ | -- | IP54 | |||||
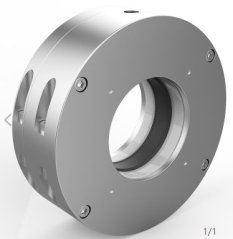
гҖҗжңәжў°е°әеҜёеӨ–еҪўеӣҫгҖҗь/span>






жҡӮж— ж•°жҚ®пј
 泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„е·ҘдҪңеҺҹзҗҶд»Ӣз»Қпјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„дҪҝз”Ёж–№жі•пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMеӨҡе°‘й’ұдёҖеҸ°пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMдҪҝз”Ёзҡ„жіЁж„ҸдәӢйЎёь/li>泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„иҜҙжҳҺд№Ұжңүеҗ—пјһь/li>泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„ж“ҚдҪң规зЁӢжңүеҗ—пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„жҠҘд»·еҗ«зҘЁеҗ«иҝҗиҙ№еҗ—пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMжңүзҺ°иҙ§еҗ—пјһь/li>泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMеҢ…е®үиЈ…еҗ—пјһь/li>
泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„е·ҘдҪңеҺҹзҗҶд»Ӣз»Қпјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„дҪҝз”Ёж–№жі•пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMеӨҡе°‘й’ұдёҖеҸ°пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMдҪҝз”Ёзҡ„жіЁж„ҸдәӢйЎёь/li>泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„иҜҙжҳҺд№Ұжңүеҗ—пјһь/li>泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„ж“ҚдҪң规зЁӢжңүеҗ—пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMзҡ„жҠҘд»·еҗ«зҘЁеҗ«иҝҗиҙ№еҗ—пјҹ泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMжңүзҺ°иҙ§еҗ—пјһь/li>泰科жҷәиғҪRJS14жңәеҷЁдәәе…іиҠӮжЁЎз» жҹ”жҖ§дёҖдҪ“еҢ–е…іиҠӮжЁЎеқ— ж”ҜжҢҒOEMеҢ…е®үиЈ…еҗ—пјһь/li>






























































































































 жүӢжңәзүҲпјҡ
жүӢжңәзүҲпјҡ