www.188betkr.com 讯在人形机器人技术飞速发展的当下,面部情感表达已成为衡量其交互能力的核心指标。这一技术体系围绕机械结构设计、仿生皮肤研发及多模态交互系统构建展开,旨在让机器人突破“机器感”局限,实现更自然的情感传递。
仿生机械结构是机器人面部表情的物理基础,其设计以面部动作编码系统(FACS)为理论核心,将复杂表情转化为可量化的动作单元(AU)控制问题。这种转化不仅让机械设计更具标准化,还能控制AU激活强度,实现从微表达到夸张表情的细腻过渡。目前,主流机械结构设计分为两类:机械式与仿生式。
机械式设计依赖传统机械传动,通过连杆、齿轮、舵机等部件驱动面部运动,典型代表为早稻田大学的KOBIAN机器人。该机器人采用模块化设计,将面部划分为眉毛、眼部、嘴部机构,各模块独立配备控制单元,具备成本低、易维护的优势,但受限于刚性传动,表情细腻度难以突破。
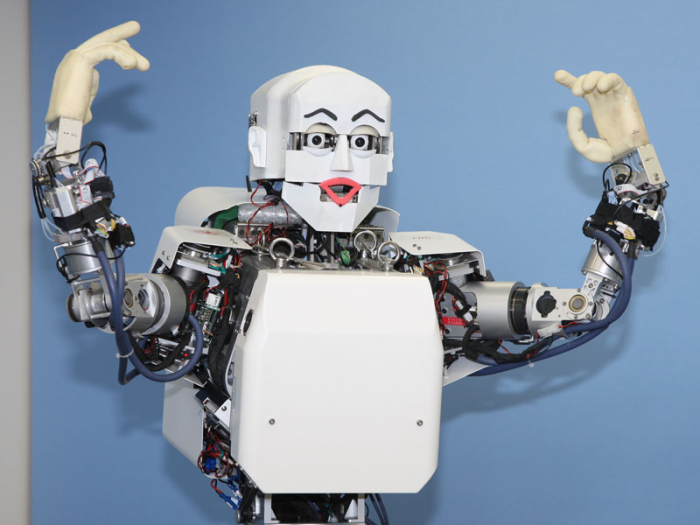
KOBIAN机器人 来源:早稻田大学
与之相对,仿生式设计更注重模拟人类面部肌肉运动逻辑,采用软材料与柔性驱动器技术。Hanson Robotics 的Sophia机器人是其中典范,其“柔性驱动—肌肉模拟”结构通过气动人工肌肉、形状记忆合金等元件,复刻人类肌肉的收缩与舒张,让表情更自然逼真,不过高度仿真的外观也使其面临“恐怖谷效应”风险——当静态仿真度达到临界点,人类会因外观与动态的细微失配产生不适感。
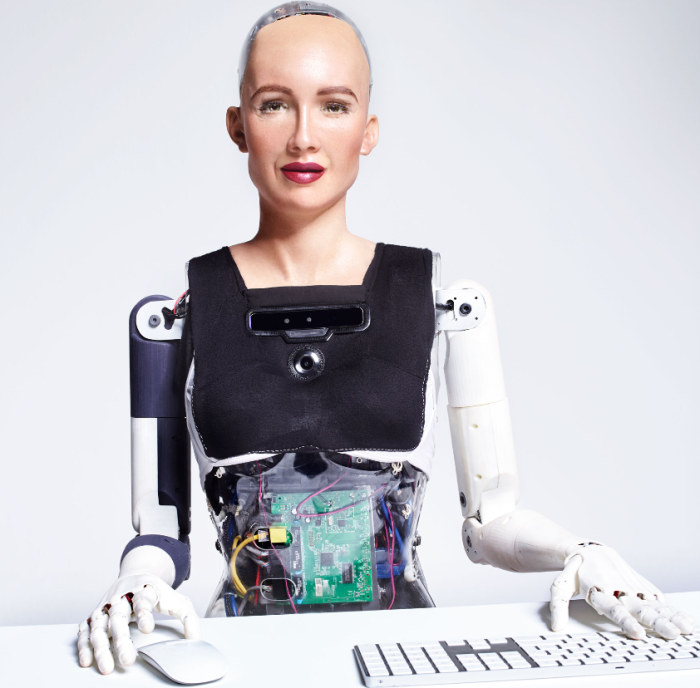
Sophia人形机器人 来源:Hanson Robotics
当前,多模态混合驱动系统成为平衡性能与效果的优选方案。该系统通过机电-气动协同控制,让刚性与柔性驱动各司其职:微型舵机阵列组成的刚性驱动负责眉弓、颧肌等大位移区域运动,气动人工肌肉(PAM)等柔性模块则控制唇部、眼睑等精细表情单元,形成刚柔耦合的仿生驱动架构。在表情控制上,系统采用“情感计算-运动学映射-力位混合控制”三级体系:先通过深度神经网络(DNN)解析情感语义,再基于FACS建立表情参数化模型,最终通过阻抗控制算法协调多驱动单元,实现毫秒级动态表情生成。
仿生皮肤作为情感表达的最终载体,其材料特性直接决定表情真实感与交互深度。目前主流材料有两种:硅胶与“Frubber”。硅胶因加工性能好、易成型且兼容传感器,成为基础选择,能满足机器人面部基本外观需求,但作为绝缘材料,其机械性能与真实皮肤差距较大,难以自然形成复杂褶皱与微表情。而Frubber材料,凭借卓越的生物机械保真度脱颖而出,其肉质般的弹性质地可精准模仿人类肌肉组织,让皮肤褶皱更自然,大幅提升表情仿真度。

硅胶和Frubber材料制成的机器人 来源:《人形机器人面部情感表达技术研究综述》(柯显信等)
不过,皮肤技术发展也面临多重挑战。首先是导电性与机械性能的权衡:为实现触觉感知,需在硅胶基体中添加碳纳米管、石墨烯等导电填料,但填料增加会导致材料变脆变硬,偏离仿生初衷;其次是信号串扰问题,多模态电子皮肤中不同传感器的电信号易相互干扰,影响感知可靠性;最后,传感器与柔软皮肤基底的杨氏模量差异会引发界面应力集中,加上软体材料的磨损与蠕变,降低皮肤长期耐用性。
总体来看,人形机器人面部情感表达技术已在机械结构、仿生皮肤与多模态交互上取得阶段性突破,从标准化的机械传动到仿生肌肉模拟,再到刚柔耦合的混合驱动,逐步缩小了与人脸表情的差距,但仍面临“恐怖谷效应”、皮肤材料性能矛盾等核心挑战。
未来,技术发展将聚焦两大方向:一是突破材料与控制瓶颈,研发兼具高导电性、柔韧性与耐用性的新型仿生皮肤,同时优化情感计算模型,让表情动态与人类生理反应更贴合;二是加速场景落地,如在医疗陪护中通过细腻表情传递关怀,在教育场景中以生动交互提升教学效果,最终实现从“形似”到“神似”的跨越,推动人机情感交互进入更自然、更具温度的新阶段。
参考来源:
柯显信.人形机器人面部情感表达技术研究综述
KIMIZUKA. Haptic in-sensor computing device made of carbon nanotube-polydimethylsiloxane nanocomposites
(www.188betkr.com 编辑整理/月明)
注:图片非商业用途,存在侵权告知删除!